Hello I'm
Yulian Surya Prayogo
Bachelor of Mechatronics Engineer with a passion for creating innovative solutions that leverage the power of the Internet of Things and field of Mechatronics. My expertise includes designing and implementing IoT systems, working with sensors and actuators, also developing applications for monitoring and control. Besides that i'm interested in Desktop App and Mechanical Design
Projects
ELDEN (Electronic Desktop Nametag)
ELDEN (Electronic Desktop Nametag) is a microcontroller-based desktop display designed to show customizable text wirelessly. The device can be used as a digital nametag for meetings, events, or personal workspaces such as coworking spaces or work-from-café setups. In addition to functioning as a display, ELDEN is equipped with environmental sensors including temperature and humidity monitoring. It also supports an external temperature probe for measuring the surface temperature of solid or liquid objects. All information can be displayed in real time, making the device useful not only as a desk identifier but also as a simple environmental monitoring tool.
Multi Flasher Tools for ESP32 Device
A powerful utility for flashing firmware across multiple ESP32 devices simultaneously. Simplifies development workflows with an intuitive interface, efficient batch processing, and broad compatibility with various ESP32 modules. Ideal for prototyping and production environments.
Self Service E-kiosk for restaurant
E-kiosk application for self-service in a restaurant. Utilizes interactive touchscreen functionality for placing orders, integrated with a backend for menu management and order processing. Also can integrate with any printer to print the order receipt
Box Filling Machine with IIoT Dashboard
Box filling machine simulation with Siemens S7-1500. Using several instructions such as set, reset, counter and timer to achieve desired machine flow. Connected to IoT platform using IP address and visualize through NodeRED dashboard
Transporter Robot Based on Line Sensor
This robot uses a line sensor to track and follow lines based on their appearance, ensuring accurate navigation. It is equipped with gripper to pick and place object, IR distance sensors for wall tracing and 12V DC motor to powering robot's movement
Siemens S7-1200 simulation with FactoryIO
Perform simulation for box sorting process based on its height. Using several PLC instructions such as timer, counter, set and reset. It also store the counter data to Data Block which can be acces for other devices.
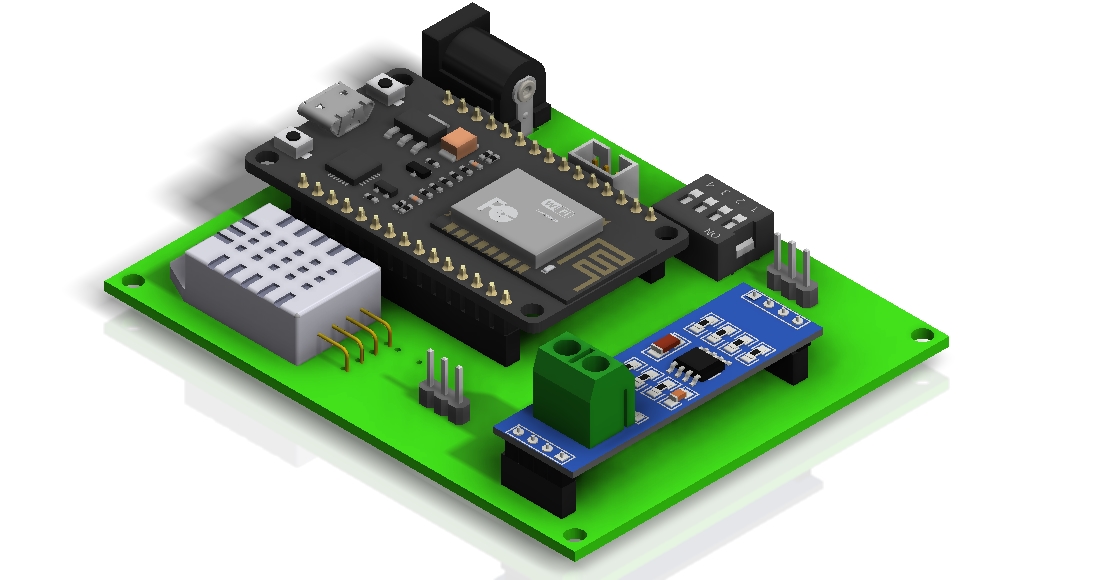
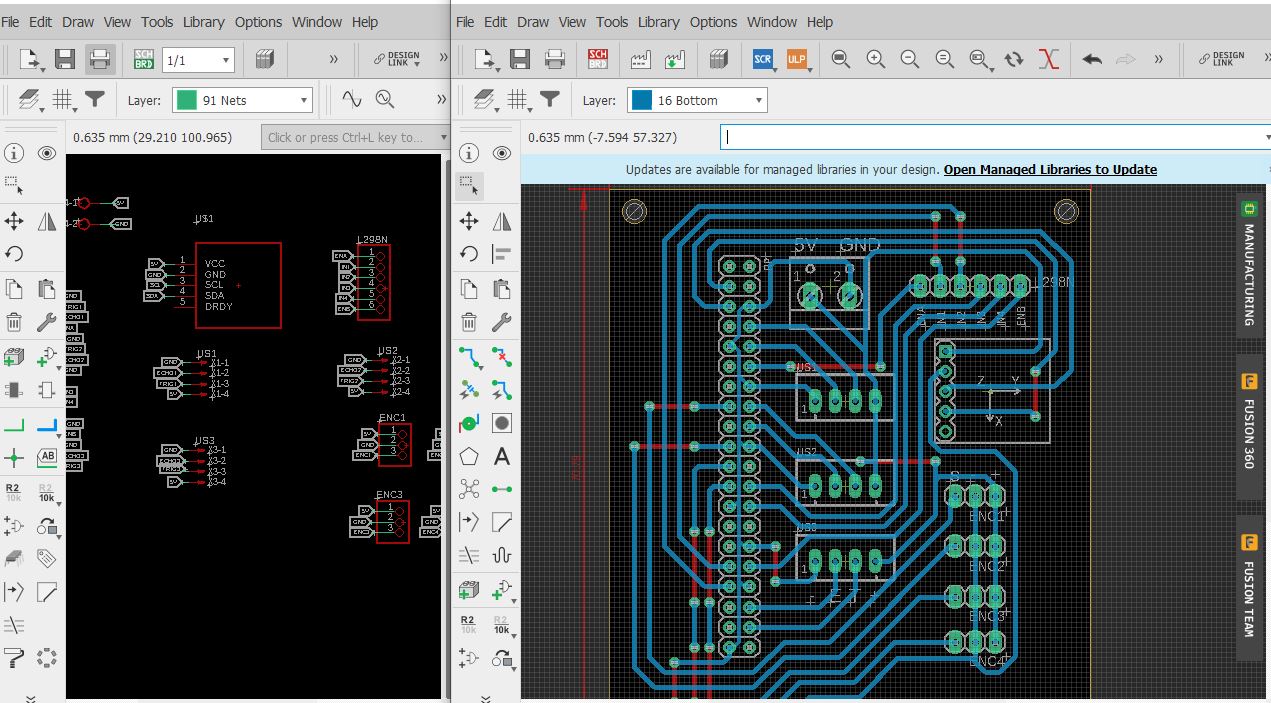
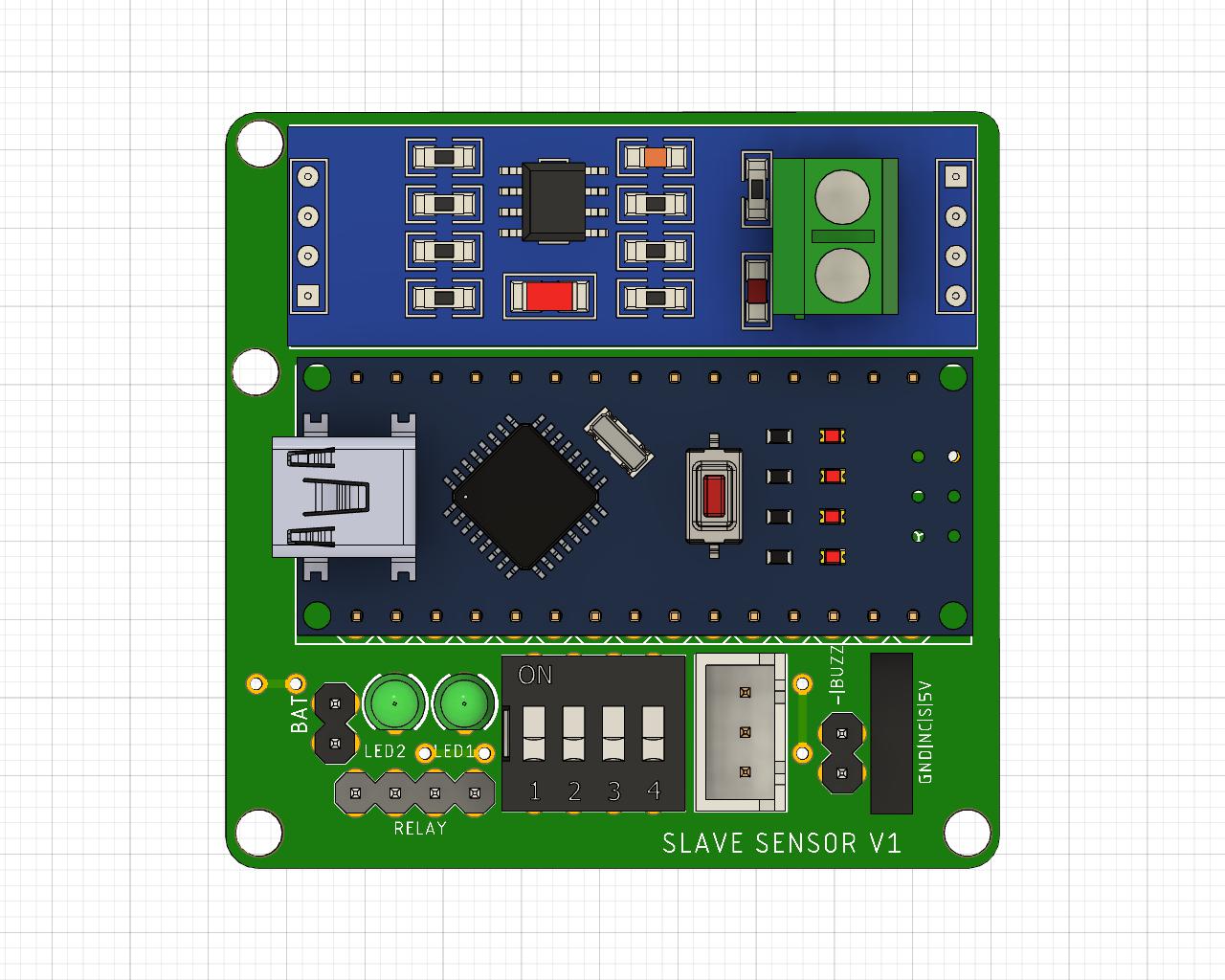
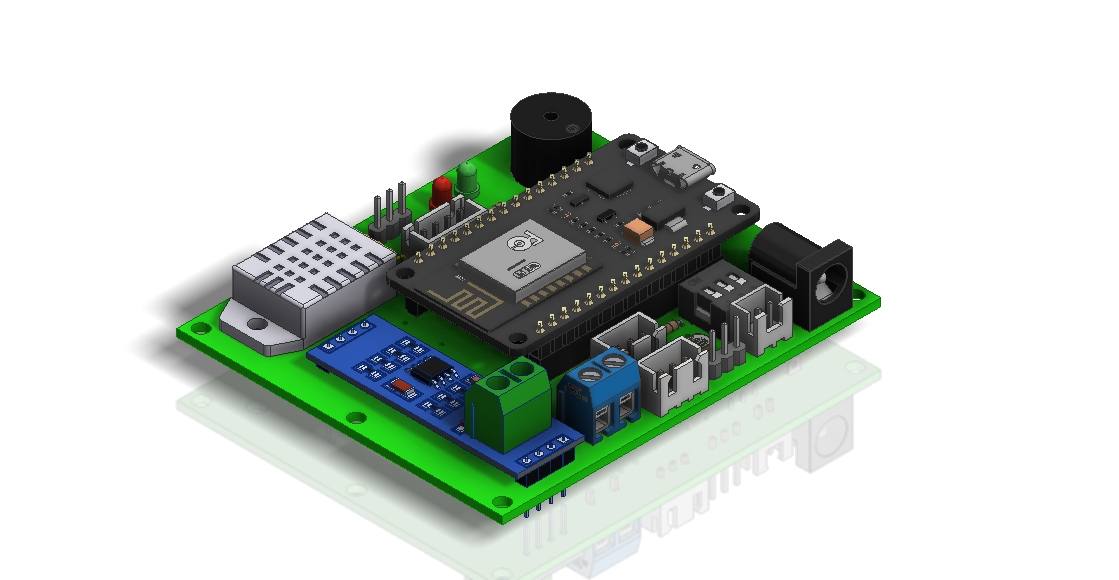
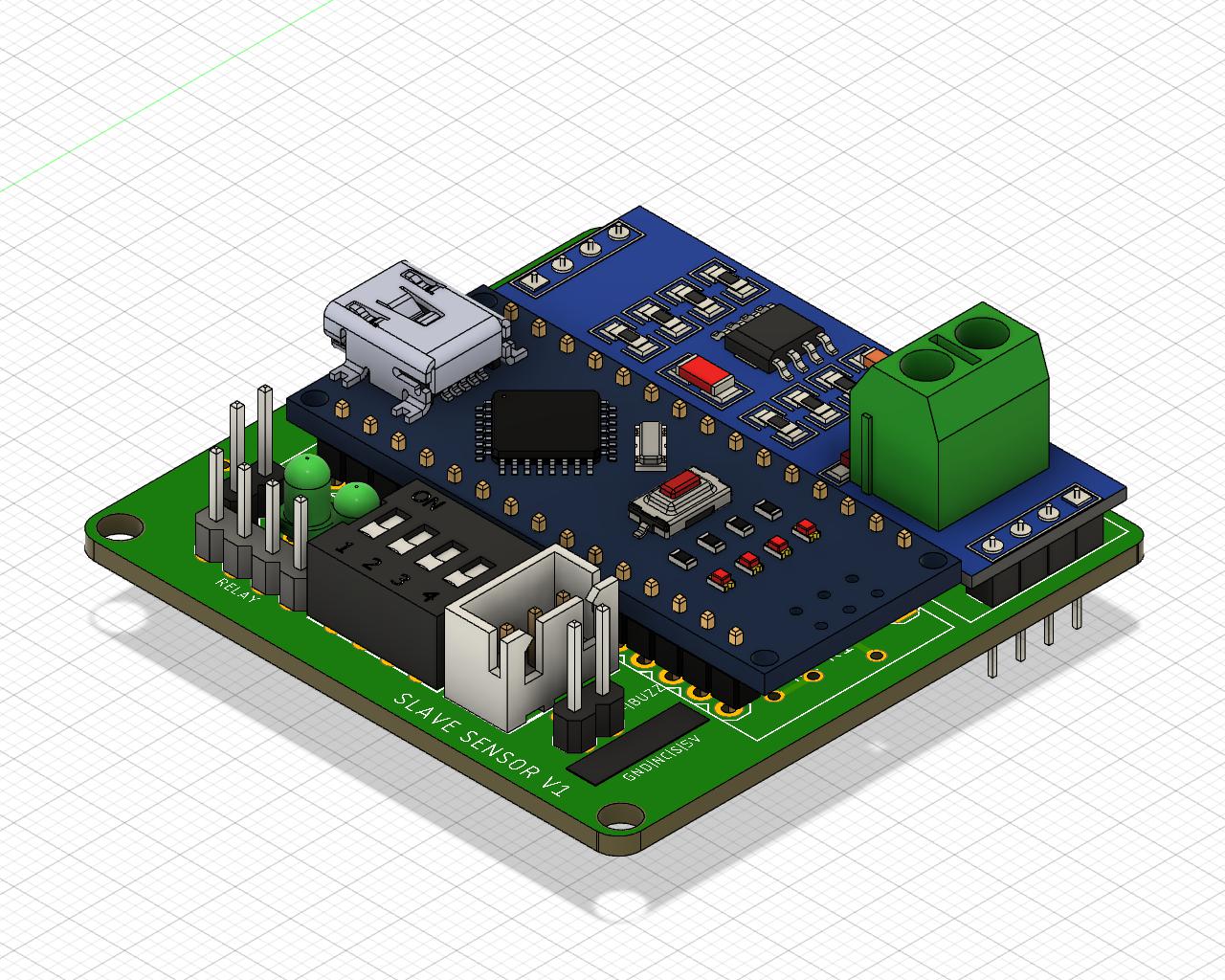
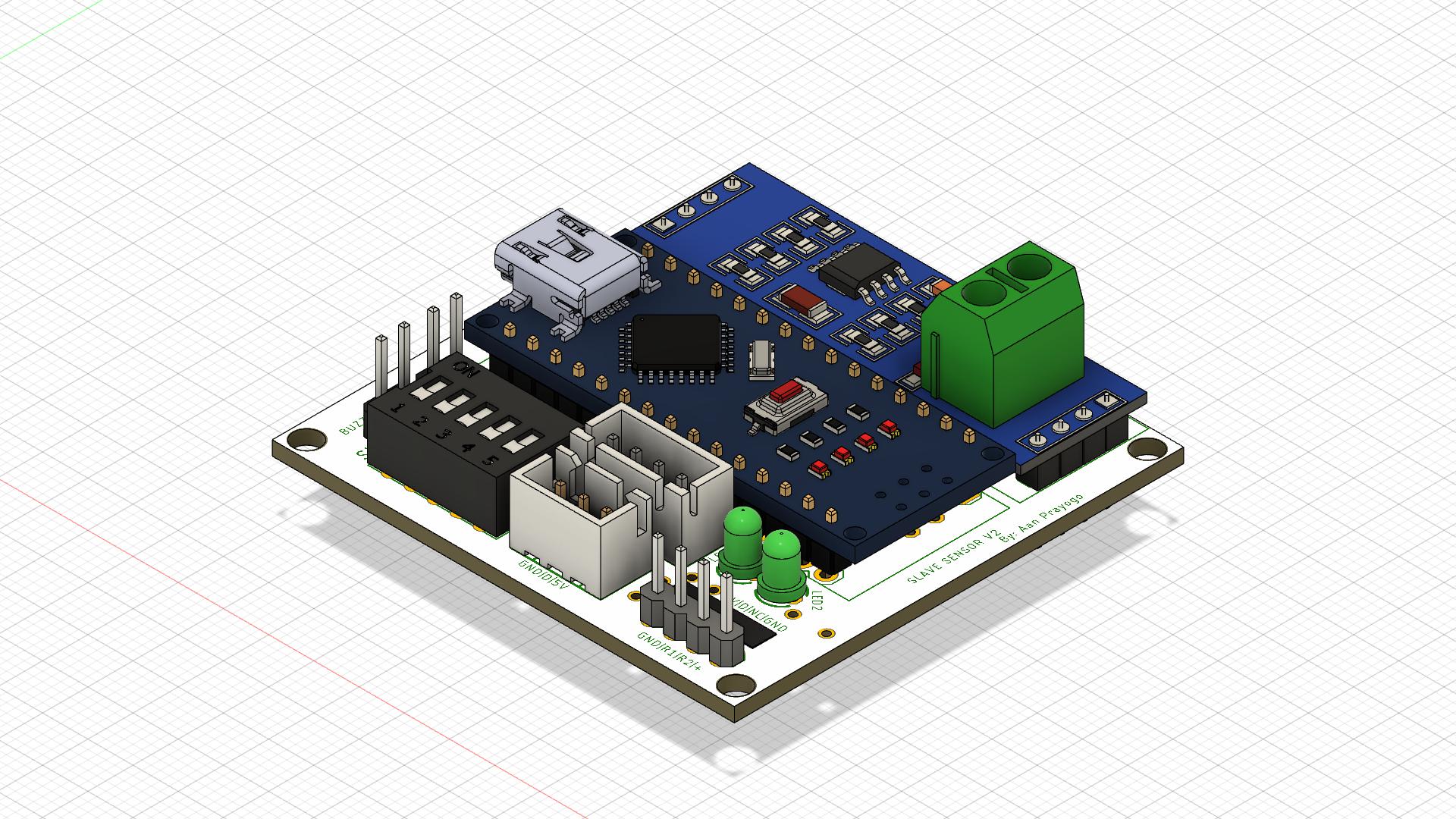
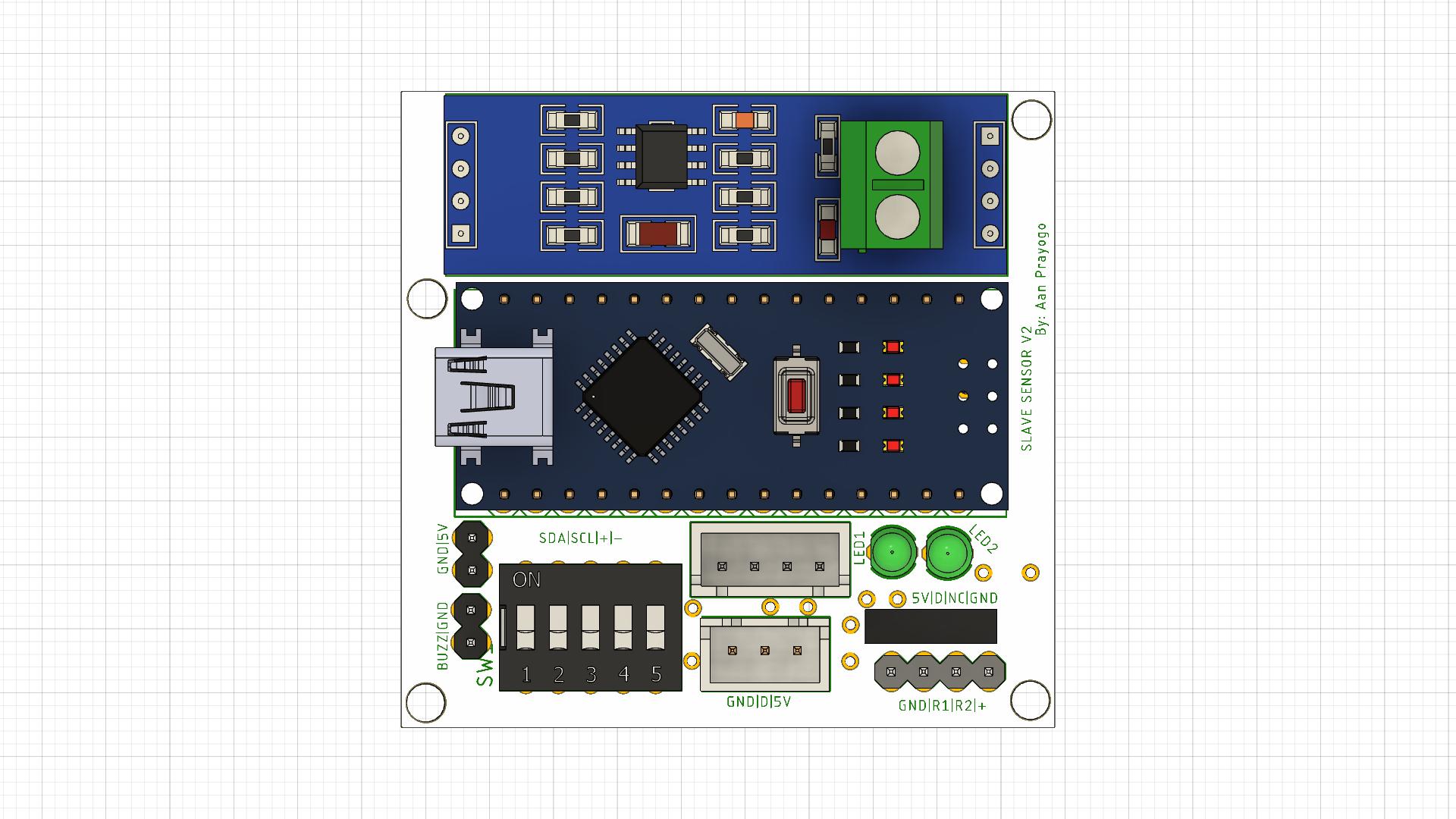
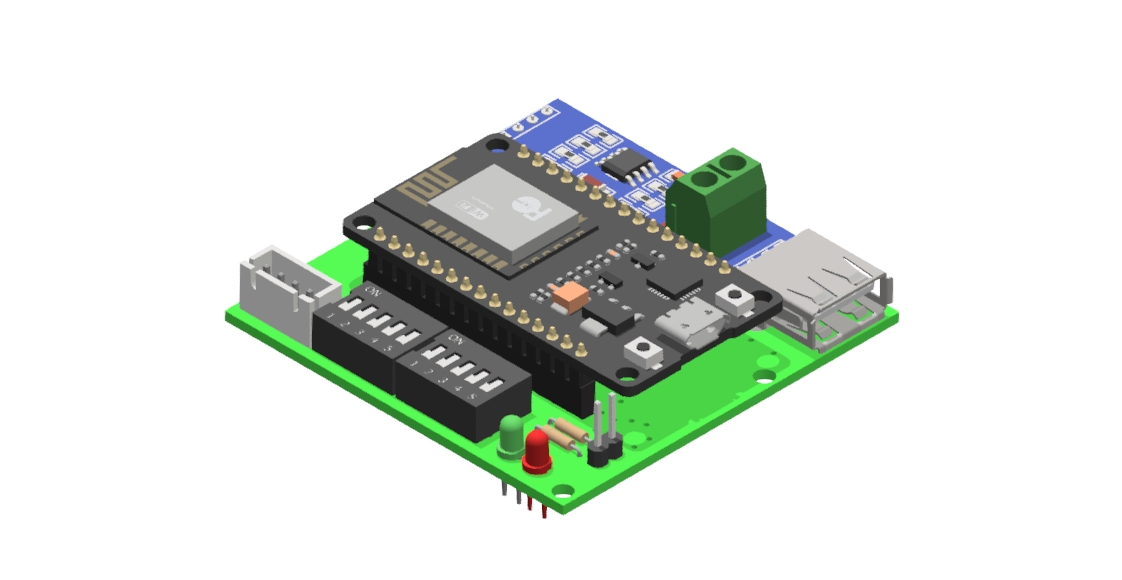
IoT Node Temperature Sensor
Node Sensor based on WeMos D1 Mini integrated with DS18B20 as contact temperature sensor and DHT22 as air temperature and humidity sensor. it also has 0.96 inch OLED display to show current IP address and current sensor condition. It post data to endpoint every ten seconds and visualize into Grafana
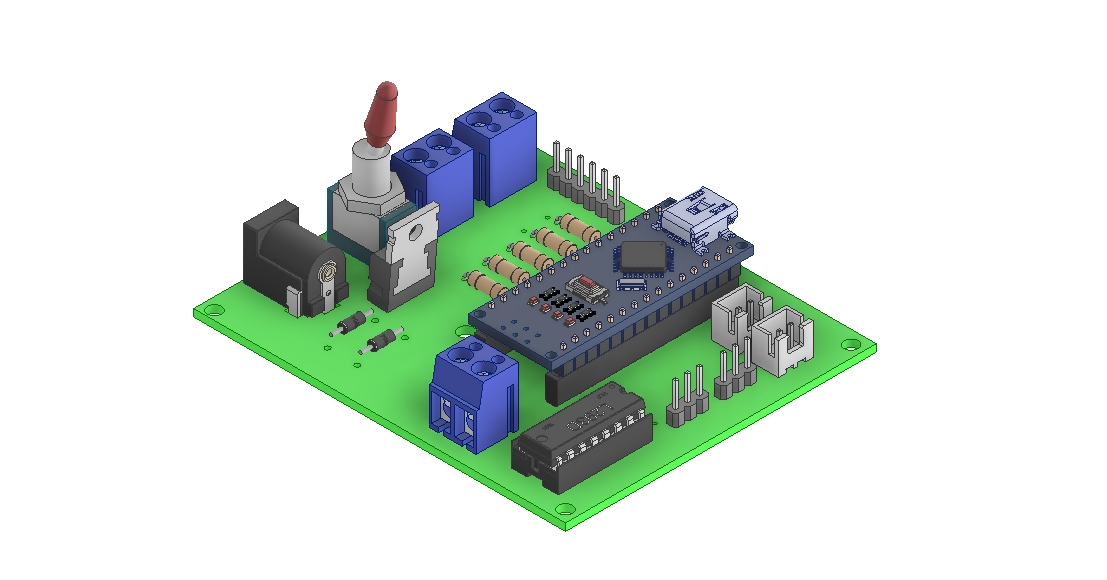
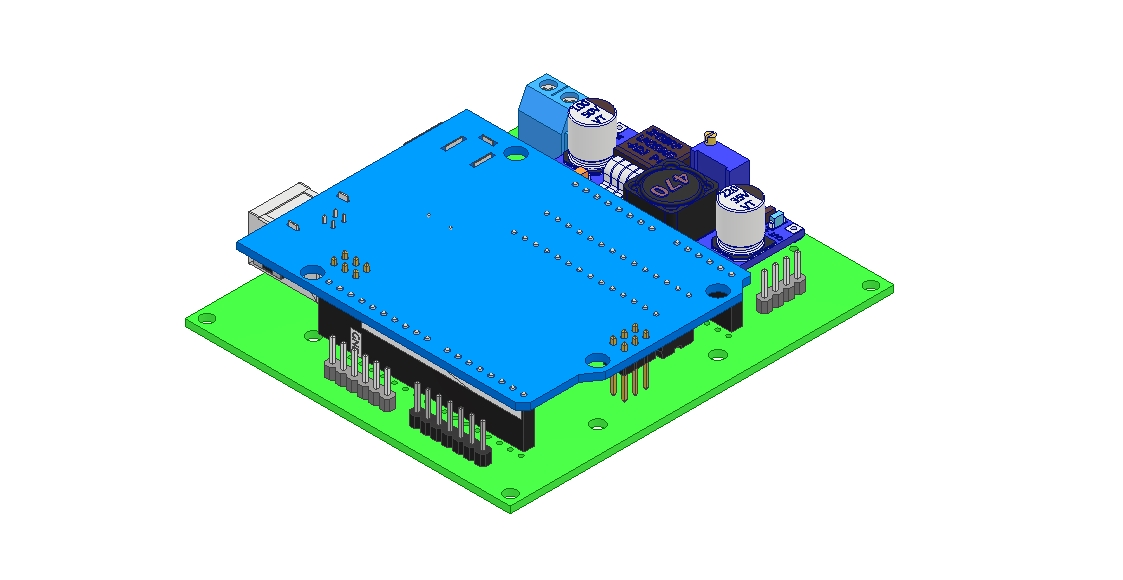
Mobile Robot Control Station
A Control Station based on Desktop App to navigate and monitor the attitude of the mobile robot. It equipped by Raspberry Pi 3B+ as Main Computer, Arduino Uno as slave device and several sensors such as GPS and Compass to retrieve data. it Also has webcam to stream realtime video through web socket
QR Attendance System
Attendance system using QR Scanner from webcam. Push Image for QR and Notification through the telegram bot. Clock in and Clock out time are stored in the database. Can be retrieved for audit or manual checking
Theater Ticketing System
Theater Ticketing system for your favorite cinema, has several pages for showing Now Playing and Coming soon movies. Integrated with a thermal printer for printing your movie tickets.
HTTP API Testing Tool
HTTP Testing tool based on Python. It has 4 HTTP methods such as GET, POST, PUT, and DELETE. Fully built by Python libraries such as requests and the newest UI framework named flet. It also contains several widgets such as Dropdown, TextField, and ScrollView.
Parking Ticketing System
Parking Ticketing System using both Desktop App and IoT. The IoT device consists of ESP32, touch sensor and mini servo as an actuator. The ESP32 will POST to an endpoint if the touch sensor is active and save the data into the database. The Desktop App also integrated with Scanner to read the QR code and calculate the total bill of customer based on parking time.
Arduino I/O Monitor
The Arduino sends data over serial to the Desktop App, and the Desktop App will parse and show the value of each input in Arduino (Analog and Digital). The Desktop app also has several widgets like dropdown, textfield, and error handling when the serial port of Arduino fails to open.
NodeRED - ESP32 MQTT
Perform MQTT publish and subscribe method from Node-RED dashboard to ESP32 which controls the LED's state and the brightness value of LED's through PWM signal
Parcel Detail Capture System
Desktop App integrated with webcam to perform QR Code decoding. The QR code contains the parcel details such as sender name, destination, and serial number. And this system can also capture image and estimate the width and length of the parcel based on computer vision
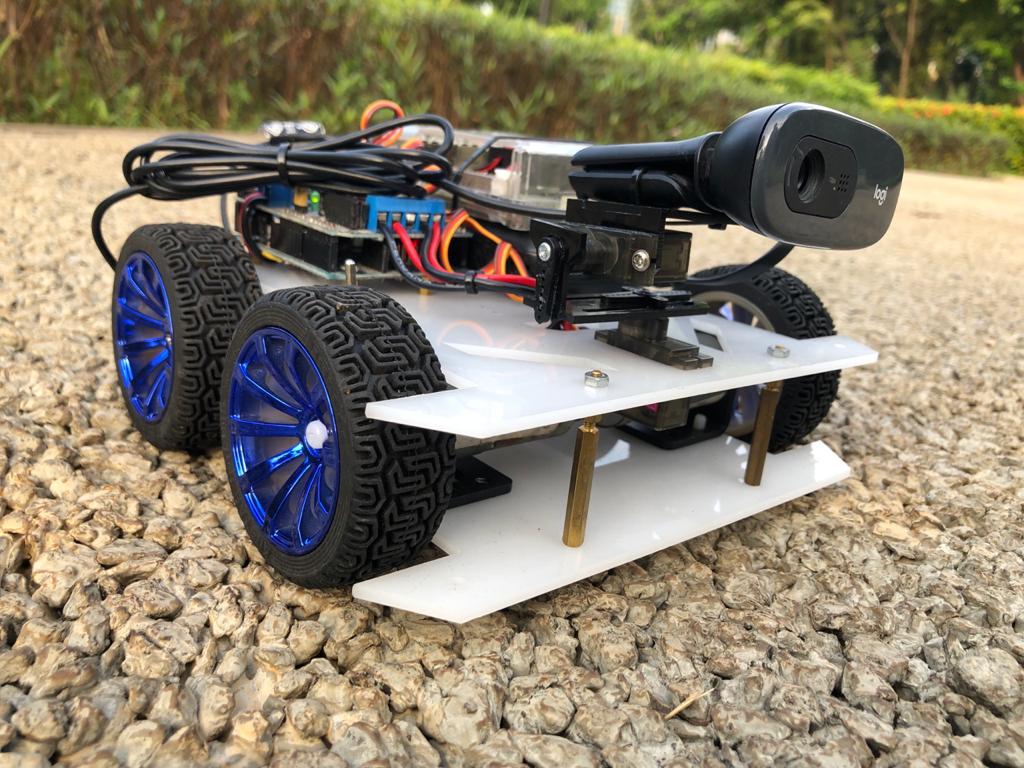
SpyCam Mobile Robot V2
4-wheel-drive mobile robot built using Raspberry Pi 3B+ as a mini-computer and Arduino as a slave device. The Raspberry Pi will send data over serial to the Arduino to drive the mobile robot. The robot is also equipped with a Pan and Tilt mechanism for the camera